 |
| PROJETO CONCLUÍDO COM ÊXITO !!! |
sábado, 6 de junho de 2015
APRESENTAÇÃO DO PROTÓTIPO
E finalmente, segue as fotos do dia da esperada apresentação.

Conseguimos vencer todas as dificuldades de com muita dedicação o protótipo funcionou perfeitamente.
 |
| Universidade São Francisco - Campus Itatiba 01.06.2015 |
 |
| VISTA SUPERIOR |
 |
| PLACA COM ARDUINO E FONTE DE ALIMENTAÇÃO |
 |
| SISTEMA LIGADO, LÂMPADAS DICRÓICAS PARA SIMULAÇÃO DE FALHAS. |
 |
| SERIAL MONITOR ARDUINO |
 |
| SISTEMA DE EIXOS |

 |
| PROGRAMAÇÃO / SERIAL MONITOR ARDUINO |
 |
| ARDUINO UNO |
 |
| VISTA FRONTAL |
FOTOS DO PROCESSO DE MONTAGEM
Conforme prometido pessoal, algumas fotos da montagem:
 |
| DRIVE DOS MOTORES - TESTE COM ARDUINO. |
 |
| MAIS UM SÁBADO DE MONTAGEM E TESTES. |
 |
| MOTOR DE PASSO UTILIZADO. NMB PM55L-048 |
 |
| CARRO DO SENSOR |
 |
| MANCAL PARA FIXAÇÃO NA CHAPARIA |
 |
| CARRO DE DESLOCAMENTO HORIZONTAL |
 |
| CARRO DE DESLOCAMENTO HORIZONTAL |
 |
| SISTEMA DE EIXO HORIZONTAL MONTADO |
 |
| MANCAL EIXO VERTICAL |
 |
| CANALETA DE DESLOCAMENTO DO SENSOR |
 |
| EIXO - BARRA ROSCADA M8 |
 |
| TESTE MOTORES |
 |
| TESTE MOTORES |
 |
| MONTAGEM DA PLACA - PLACA ILHADA |
 |
| SOLDAGEM DA PLACA DE ACOPLAMENTO COM BORNES PARA SENSOR E MOTORES |
 |
| CONFECÇÃO DO CABO DB25 |
 |
| BANCADA NO FIM DE DIA. |
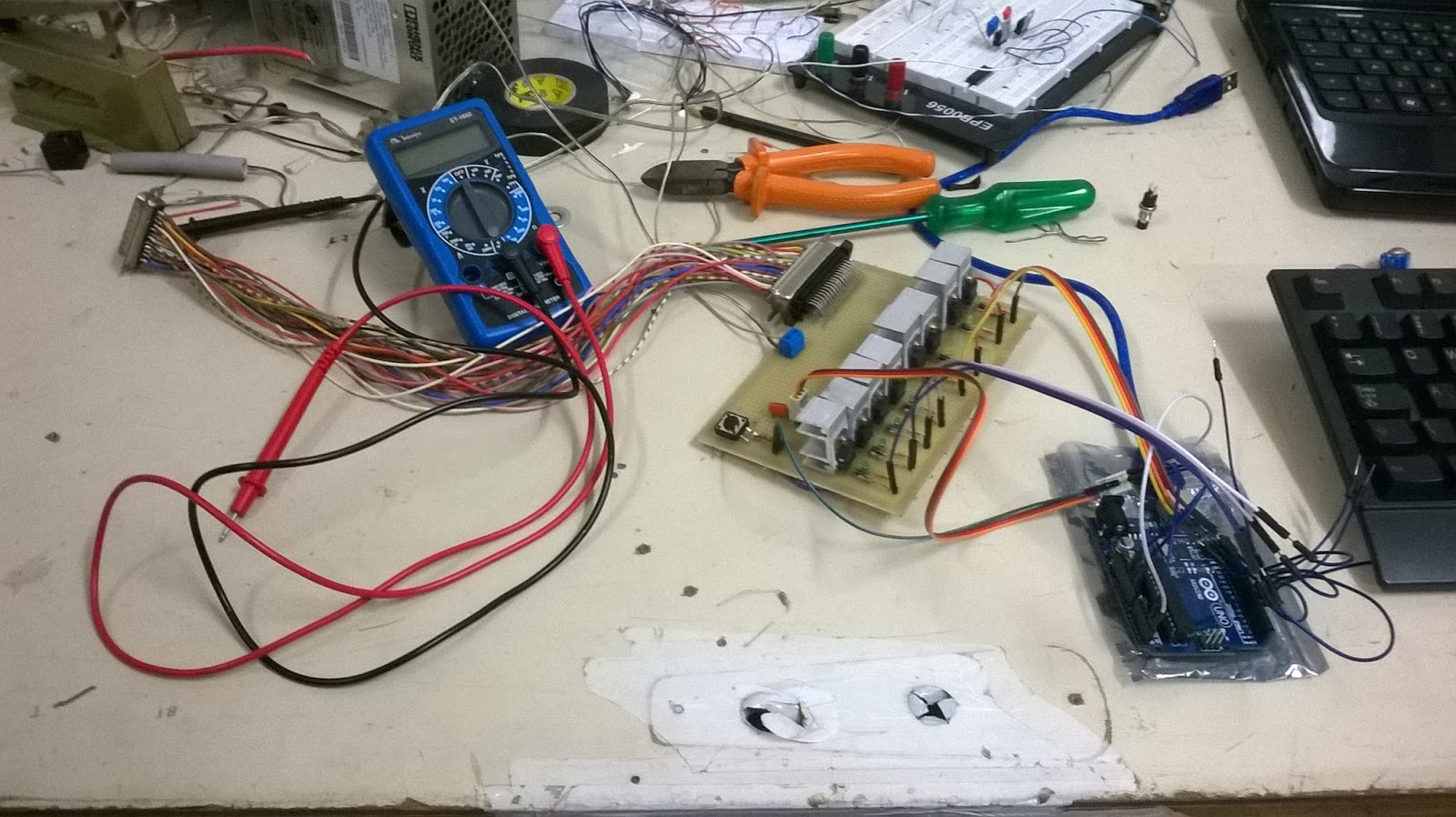 |
| PLACA ELETRÔNICA EM TESTE. |
DIFICULDADES ENCONTRADAS
Boa Tarde a todos,
Desculpem por nos distanciarmos um pouco porém estávamos na etapa de construção do protótipo e da apresentação.
E agora retornamos para o nosso blog para expor algumas fotos de como ficou o protótipo, vídeos dos testes e apresentação e também para compartilhar algumas das dificuldades que tivemos para que nossos seguidores possam se alertar nestes pontos.
 Dificuldades encontradas durante o desenvolvimento:
Dificuldades encontradas durante o desenvolvimento:
Desculpem por nos distanciarmos um pouco porém estávamos na etapa de construção do protótipo e da apresentação.
E agora retornamos para o nosso blog para expor algumas fotos de como ficou o protótipo, vídeos dos testes e apresentação e também para compartilhar algumas das dificuldades que tivemos para que nossos seguidores possam se alertar nestes pontos.
Dificuldades encontradas durante o desenvolvimento:- Corrente nos motores estava em 1,45A. Devido a esta corrente alta para o modelo de motor de passo, o mesmo apresentava muito aquecimento. Solução encontrada: Inicialmente utilizamos os transistores TIP122 para os drives dos motores, por ser um Darlington seu hfE é 1000 o que estava interferindo na corrente. Fizemos a troca para transistores convencionais de potência TIP41C.
- Aquecimento nos transistores de potência do driver, TIP41C. Solução encontrada: Instalação de dissipadores de calor.
- Corrente continuava circulando pelo COMUM do motor mesmo com ele desligado. Solução encontrada: Alteração na programação, colocar as saídas do Arduino em nível-Baixo assim que o motor parar de rodar.
- Sistemas de eixo travando durante o movimento.Por se tratar de um sistema XY os eixos e mancais utilizados necessitam serem feitos retificados, esquadrados, na fixação não pode apresentar torção, porém como não temos disponibilidade financeira, as peças não foram feitas nestas condições e os eixos são barras roscadas vendidas prontas e não fusos feitos sob medida. Solução encontrada: Aumentamos os furos pra que os eixos trabalhasse com uma folga a mais. O sistema apresentou um jogo porém como a precisão milimétrica não influencia no nosso sistemas isso não foi um obstáculo.
Depois de tantas dificuldades chegou a hora de mostrar o fruto de vários Sábados e Domingos montando este protótipo.
"Dificuldades e obstáculos são fontes valiosas de saúde e força para qualquer sociedade."
"No meio da dificuldade encontra-se a oportunidade."
Albert Einstein
domingo, 29 de março de 2015
DEFEITOS ENCONTRADOS
Nas imagens abaixo podemos perceber alguns erros encontrados em uma Análise Termográfica, com isso evidenciamos a importância desta análise na indústria.
Esses dados foram obtidos em um laudo de uma Análise feita em uma importante empresa multinacional de grande porte aqui da região.
 |
| Aquecimento localizado nas conexões de entrada do disjuntor. |
 |
| Aquecimento localizado na conexão do fusível. |
 |
| Aquecimento localizado no contato da chave seccionadora na Cabine Primária. |
 |
| Aquecimento localizado na régua de bornes do painel. |
 |
| Aquecimento localizado nos barramentos "espinha de peixe" no painel de distribuição. |
PROCEDIMENTO E RESULTADOS ESPERADOS
PROCEDIMENTO
Primeira
Etapa: Testes com o sensor. Após a programação, realizaremos o teste de leitura
da temperatura, concluída esta etapa faremos diversas leitura sequenciais e com
tempos de intervalo. Após essa etapa concluída com sucesso é necessário
verificar se a temperatura medida realmente é a que se encontra o equipamento.
Possivelmente teremos que utilizar outro instrumento para comparação e assim
calibrar corretamente.
Segunda
Etapa: Testes nos motores de passo individualmente. Assim concluído, realizar
os testes com os dois motores de passo que compõem o sistema e realizar o
sincronismo dos movimentos de ambos.
 Terceira
Etapa: Após os motores de passo estarem funcionando perfeitamente será o
momento da montagem e acoplamento do sistema mecânico. É nesta etapa em que
montaremos os eixos e fixaremos no painel e assim acoplar os motores.
Terceira
Etapa: Após os motores de passo estarem funcionando perfeitamente será o
momento da montagem e acoplamento do sistema mecânico. É nesta etapa em que
montaremos os eixos e fixaremos no painel e assim acoplar os motores.
Quarta
Etapa: Realizar o mapeamento do painel e definir as regiões de possíveis falhas
e também nomear estas regiões no código fonte.
Quinta
Etapa: Instalação de materiais para simulação de falhas, como por exemplo,
conexão com mal aperto, emenda mal feita.
RESULTADOS
ESPERADOS
 O primeiro resultado que esperamos é
a leitura correta de temperatura, acreditamos que vamos enfrentar algumas
dificuldades para alcançar isto devido as variações de temperatura ambiente e também
ruídos.
O primeiro resultado que esperamos é
a leitura correta de temperatura, acreditamos que vamos enfrentar algumas
dificuldades para alcançar isto devido as variações de temperatura ambiente e também
ruídos.
Posteriormente esperamos avaliar o
sistema de movimentação e leitura do sistema em perfeito sincronismo.
E por último, ainda não definido,
apresentar os resultados de maneira clara a equipe de manutenção.
 |
| Nossa equipe, caminhando para a tão esperada apresentação do protótipo!!! |
MATERIAIS UTILIZADOS
Segue abaixo uma lista com os materiais que utilizaremos no nosso projeto e algumas explicações da literatura de cada item.
- ARDUINO UNO: O Arduino Uno é uma placa de
micro controlador baseado no ATmega328. Dispõe de 14 pinos digitais
de entrada / saída (dos quais 6 podem ser usados como saídas PWM), 6 entradas
analógicas, um ressonador cerâmico 16 MHz, uma conexão USB, um fone
de poder, um cabeçalho ICSP, e um botão de reset. Ele contém tudo o
necessário para apoiar o micro controlador; basta conectá-lo a um
computador com um cabo USB ou ligá-lo com um adaptador AC/DC ou bateria para
começar.

Arduino Uno
- SENSOR DE TEMPERATURA POR INFRAVERMELHO: O MLX90614 é um termômetro infravermelho para medição de temperatura sem contato. Integrado no MLX90614 estão um amplificador de baixo ruído, ADC 17-bit e uma poderosa unidade DSP conseguindo alta precisão e resolução do termômetro. O sensor já vem calibrado de fábrica com uma saída SMBus digitais dando acesso total à temperatura medida na faixa de temperatura completo (s) com uma resolução de 0,02 ° C. O usuário pode configurar a saída digital para ser PWM. Como padrão, o PWM de 10 bits está configurado para transmitir continuamente a temperatura medida na gama de -20 a 120 ° C, com uma resolução de 0,14 ° C saída.
 |
| Sensor de Temperatura Infravermelho |
- MOTORES DE PASSO: Os motores de passo são utilizados para se obter um posicionamento preciso por controle digital. O motor funciona sincronizando o sinal de saída de pulso do controlador para o driver. Os motores de passo, são ideais para aplicações que requeiram rápido posicionamento em uma distância reduzida. Eles são utilizados em diversos tipos de equipamentos para obter o ângulo preciso de rotação e controle da velocidade por meio de sinais de impulsos. Os motores de passo geram alto torque com um corpo compacto e são ideais para uma rápida aceleração e resposta. Os motores de passo também mantêm suas posições em parado, graças ao seu design mecânico. As soluções de motor de passo consistem em um driver (que leva os sinais de pulso e os converte em movimento do motor) e um motor de passo.Um motor de passos gira em um ângulo de passo fixo, assim como o ponteiro dos segundos de um relógio. Esse ângulo é chamado de "ângulo de passo básico".
- DRIVER PARA MOTOR DE PASSO: Hardware específico para acionamento de motores de passo.
- SISTEMA DE EIXOS: Esta parte mecânica ainda
está sendo definida porém utilizaremos para a construção dos eixos 4 barras roscada,
sendo duas utilizadas para o eixo X e duas para o eixo Y. Uma ponta da barra
principal de cada eixo será presa a ponta de eixo do motor de passo e a outra
ficará presa em um rolamento para facilitar o deslocamento. O sensor será
fixado a uma base de acrílico que fará o movimento por porcas roscadas nas
barras. Este sistema de eixos contará também com isoladores de epóxi que serão
fixados nos perfis do painel para manter a isolação.

Isolador de Epóxi

Barras roscadas 
Rolamento
- CAIXA DE SOBREPOR: Utilizaremos uma caixa de sobrepor nas dimensões: 400x350x200mm (AxLxP). Esta caixa possuirá em seu interior componentes para simulação dos defeitos, podendo ser canaleta para cabos, bornes de passagem, disjuntor com barramento de entrada/saída, contator.
 |
| Canaleta para passagens dos cabos |
 |
| Caixa de Sobrepor |
 |
| Trilhos para fixação dos componentes |
 |
| Layout Sugestivo para montagem do nosso projeto. |
Assinar:
Postagens (Atom)